應用程式中可用的參數。
命名空間:IntervalZero.KINGSTAR.Base
組合: IntervalZero.KINGSTAR.Base (於 IntervalZero.KINGSTAR.Base.dll) 版本:4.4.0.0
語法
public enum McAxisParameterPublic Enum McAxisParameter成員
PLCopen 標準
- KINGSTAR 存在軟體極限值,可防止插補發送超過這個目標的值,而伺服驅動器本身不會更動,但其會影響 KINGSTAR Motion (非總線)控制伺服驅動器的方式。
- 軟體極限在主控設備插補模式與直接速度模式中永遠有效,使用者可選擇是否在從屬設備控制模式(如從站原點復歸與原點復歸過程)關閉這個功能,而軟體極限不使用於手動模式(也就是總線套件)。
| 名稱 | 值 | 資料型別 | R/W | 定義 |
|---|---|---|---|---|
| mcCommandedPosition | 1 | double | R | 命令位置。 |
| mcSoftLimitPositive | 2 | double | R/W | 正軟體極限開關位置,若命令值大於此值,軸將向前移動,直到達到軟體極限開關後停止。 |
| mcSoftLimitNegative | 3 | double | R/W | 負軟體極限開關位置,若命令值小於此值,軸將向後移動,直到達到軟體極限開關後停止。 |
| mcEnableLimitPositive | 4 | double | R/W | 啟動正軟體極限開關。 |
| mcEnableLimitNegative | 5 | double | R/W | 啟動負軟體極限開關。 |
| mcEnablePosLagMonitoring | 6 | double | R/W | 啟動位置延遲監控(跟隨誤差)。 |
| mcMaxPositionLag | 7 | double | R/W | 最大位置誤差(跟隨誤差)。 |
| mcMaxVelocitySystem | 8 | double | R/W | 運動系統中軸的最大速度。 |
| mcMaxVelocityApplication | 9 | double | R/W | 應用程式中軸的最大速度。 |
| mcActualVelocity | 10 | double | R | 實際速度。 |
| mcCommandedVelocity | 11 | double | R | 命令速度。 |
| mcMaxAccelerationSystem | 12 | double | R | 運動系統中軸的最大加速度。 |
| mcMaxAccelerationApplication | 13 | double | R/W | 應用程式中軸的最大加速度。 |
| mcMaxDecelerationSystem | 14 | double | R | 運動系統中軸的最大減速度。 |
| mcMaxDecelerationApplication | 15 | double | R/W | 應用程式中軸的最大減速度。 |
| mcMaxJerkSystem | 16 | double | R | 運動系統中軸的最大加加速度。 |
| mcMaxJerkApplication | 17 | double | R/W | 應用程式中軸的最大加加速度。 |
軸配置
| 名稱 | 值 | 資料型別 | R/W | 定義 |
|---|---|---|---|---|
| mcAlias | 1001 | double | R/W | 軸別名。 |
| mcInterpolationTime | 1002 | double | R/W |
設定軸的插補時間(單位:秒)。 注意:由於目前不支援更新軸插補週期的功能,因此無法設定此參數。 |
| mcAvailableControlModes | 1003 | double | double | 軸可用的控制模式。 |
| mcControlMode | 1004 | double | R/W | 在運行時改變軸的控制模式,此控制模式必須與當前存取模式相容,非所有軸都支援在運作時更改控制模式。 |
| mcHomeSwitchModuleType | 1005 | double | R/W | 配置原點回歸感測器,當感測器連接到軸輸入,設為 TRUE;若連接到 I/O 模組,設為 FALSE 。 |
| mcHomeSwitchModuleIndex | 1006 | double | R/W | 配置原點回歸感測器,其識別何 I/O 模組或軸內含感測器,別名將影響此參數。若無分配的感測器則值為 -1。 |
| mcHomeSwitchOffset | 1007 | double | R/W | 配置原點回歸感測器。在 I/O 模組輸入緩衝區的數位輸入偏移量。 |
| mcHomeSwitchInvert | 1008 | double | R/W | 配置原點回歸感測器,其決定是否倒轉感測器值。 |
| mcPositiveLimitSwitchModuleType | 1009 | double | R/W | 配置最大極限感測器,當感測器連接到軸輸入,設為 TRUE;若連接到 I/O 模組,設為 FALSE 。 |
| mcPositiveLimitSwitchModuleIndex | 1010 | double | R/W | 配置最大極限感測器,其識別何 I/O 模組或軸內含感測器,別名將影響此參數。 |
| mcPositiveLimitSwitchOffset | 1011 | double | R/W | 配置最大極限感測器,在 I/O 模組輸入緩衝區的數位輸入偏移量。 |
| mcPositiveLimitSwitchInvert | 1012 | double | R/W | 配置最大極限感測器並倒轉感測器值。 |
| mcNegativeLimitSwitchModuleType | 1013 | double | R/W | 配置最小極限感測器,當感測器連接到軸輸入,設為 TRUE;若連接到 I/O 模組,設為 FALSE 。 |
| mcNegativeLimitSwitchModuleIndex | 1014 | double | R/W | 配置最小極限感測器,其識別何 I/O 模組或軸內含感測器,別名將影響此參數。 |
| mcNegativeLimitSwitchOffset | 1015 | double | R/W | 配置最小極限感測器,在 I/O 模組輸入緩衝區的數位輸入偏移量。 |
| mcNegativeLimitSwitchInvert | 1016 | double | R/W | 配置最小極限感測器,其決定是否倒轉感測器值。 |
| mcSoftwareLimitPositive | 1017 | double | R/W | 軸的正軟體極限。 |
| mcSoftwareLimitNegative | 1018 | double | R/W | 軸的負軟體極限。 |
| mcEnablePositiveLimitSwitch | 1019 | double | R/W | 啟用或停用最大極限感測器。 |
| mcEnableNegativeLimitSwitch | 1020 | double | R/W | 啟用或停用最小極限感測器。 |
| mcEnableSoftwareLimitPositive | 1021 | double | R/W | 啟用或停用正軟體極限開關。 |
| mcEnableSoftwareLimitNegative | 1022 | double | R/W | 啟用或停用負軟體極限開關。 |
| mcEnableFollowingErrorMonitoring | 1023 | double | R/W | 啟用或停用監控跟隨誤差。 |
| mcCountPerUnitNumerator | 1024 | double | R/W | 將使用者定義位置單位的轉換比率設定為軸使用的脈衝單位,其用來轉換驅動器單位至使用者單位,例如,若裝置為編碼器,則通常分子是編碼器的解析度。 |
| mcCountPerUnitDenominator | 1025 | double | R/W | 將使用者定義位置單位的轉換比率設定為軸使用的脈衝單位,其用來轉換驅動器單位至使用者單位,例如,若使用度數,因一旋轉為 360 度,則值將為 360。 |
| mcCountPerUnitReverse | 1026 | double | R/W | 反轉伺服馬達的旋轉方向。 |
| mcSecondaryCountPerUnitNumerator | 1027 | double | R/W | 將使用者定義位置單位的轉換比率設定為軸使用的脈衝單位,其用來轉換驅動器單位至使用者單位,例如,若裝置為編碼器,則通常分子是編碼器的解析度。 |
| mcSecondaryCountPerUnitDenominator | 1028 | double | R/W | 將使用者定義位置單位的轉換比率設定為軸使用的脈衝單位,其用來轉換驅動器單位至使用者單位,例如,若使用度數,因一旋轉為 360 度,則值將為 360。 |
| mcSecondaryCountPerUnitReverse | 1029 | double | R/W | 反轉伺服馬達的旋轉方向。 |
| mcPosToVelRatio | 1030 | double | R/W | 將速度從每秒計數轉換為伺服驅動器使用的單位。 |
| mcTorquePolarityReverse | 1031 | double | R/W | 反轉軸的扭矩方向。 |
| mcRealUnitConversion | 1032 | double | R/W | 設定軸使用真實單位或脈衝單位。 |
| mcActualFollowingError | 1033 | double | R/W | 當前跟隨誤差。 |
| mcEnablePositiveDirection | 1034 | double | R/W | 啟用正方向。 |
| mcEnableNegativeDirection | 1035 | double | R/W | 啟用負方向。 |
| mcModuloAxisValue | 1085 | double | R/W |
為模數軸設定模數值,例如 360°。預設值為 uint.MaxValue。 若函式執行成功,則回傳 errNoError;若函式執行失敗,則回傳其中一個錯誤:
|
| mcEnableModuloAxis | 1086 | double | R/W |
啟用或停用模數軸。啟用此參數後需設定模數值,否則將使用預設模數值 uint.MaxValue。 若函式執行成功,則回傳 errNoError;若函式執行失敗,則回傳其中一個錯誤:
|
運動與 PID
現有 KINGSTAR 版本不支援 mcJolt。
| 名稱 | 值 | 資料型別 | R/W | 定義 |
|---|---|---|---|---|
| mcMotionProfileType | 1036 | double | R/W | 設置軸的加速度與加加速度參數單位。 |
| mcMinimumFollowingError | 1037 | double | R/W | 最小跟隨誤差。若目標位置與實際位置間的距離較此值小,則軸將被視為在目標位置而運動將停止。 |
| mcMaximumFollowingError | 1038 | double | R/W | 最大跟隨誤差。 |
| mcMaximumVelocity | 1039 | double | R/W | 插補所使用的最大速度。 |
| mcAcceleration | 1040 | double | R/W | 插補的最大加速度。 |
| mcDeceleration | 1041 | double | R/W | 插補的最大減速度。 |
| mcJerk | 1042 | double | R/W | 插補的最大加加速度。 |
| mcJolt | 1043 | double | R/W | 插補的最大加加加速度。 |
| mcFeedbackDelay | 1044 | double | R/W | 回饋延遲發生在 KINGSTAR 傳送指令與從伺服驅動器接收結果之期間,為確保軸到達目標位置(或速度、扭矩),KINGSTAR 會將實際位置與前幾週期傳送的命令位置做比較。FeedBackDelay 為 KINGSTAR 回溯週期的數量,通常為 3 個週期。 |
| mcVelocityKP | 1045 | double | R/W | 速度模式中的比例增益。 |
| mcVelocityKI | 1046 | double | R/W | 速度模式中的積分增益。 |
| mcVelocityKILimitPercent | 1047 | double | R/W | 最大輸出中的最大積分誤差(單位為百分比)。例如當最大速度為 50、KILimitPercent 為 10,則速度的最大積分誤差為 5%。 |
| mcVelocityKD | 1048 | double | R/W | 速度模式中的微分增益。 |
| mcVelocityKV | 1049 | double | R/W | 速度模式中的速度前饋增益。 |
| mcVelocityKAA | 1050 | double | R/W | 速度模式中的加速度前饋增益。 |
| mcVelocityKAD | 1051 | double | R/W | 速度模式中的減速度前饋增益。 |
| mcVelocityKJ | 1052 | double | R/W | 速度模式中的加加速度前饋增益。 |
| mcVelocityReducedGainsDelay | 1053 | double | R/W | 決定完成運動後軸何時開始使用 mcVelocityRgFactor(單位:秒)。 |
| mcVelocityRgFactor | 1054 | double | R/W | KP、KI 和 KD 會在 mcVelocityReducedGainsDelay 後乘上此倍數。 |
| mcVelocityKIStoppedOnly | 1055 | double | R/W | 在速度模式中使用 KI 修正穩態誤差 (steady-state error)。 |
| mcVelocityKDUseSecondEncoder | 1056 | double | R/W | 在速度模式中為 KD 使用內部位置編碼器。 |
| mcVelocityMinimumOutput | 1057 | double | R/W | PID 之最小輸出。最小速度。 |
| mcVelocityMaximumOutput | 1058 | double | R/W | PID 之最大輸出。最大速度。 |
| mcTorqueKP | 1059 | double | R/W | 扭矩模式中的比例增益。 |
| mcTorqueKI | 1060 | double | R/W | 扭矩模式中的積分增益。 |
| mcTorqueKILimitPercent | 1061 | double | R/W | 最大輸出中的最大積分誤差(單位為百分比)。例如當最大扭矩為 50%、KILimitPercent 為 10%,則最大積分誤差為扭矩的 5%。 |
| mcTorqueKD | 1062 | double | R/W | 扭矩模式中的微分增益。 |
| mcTorqueKV | 1063 | double | R/W | 扭矩模式中的速度前饋增益。 |
| mcTorqueKAA | 1064 | double | R/W | 扭矩模式中的加速度前饋增益。 |
| mcTorqueKAD | 1065 | double | R/W | 扭矩模式中的減速度前饋增益。 |
| mcTorqueKJ | 1066 | double | R/W | 扭矩模式中的加加速度前饋增益。 |
| mcTorqueReducedGainsDelay | 1067 | double | R/W | 決定完成運動後軸何時開始使用 mcTorqueRgFactor(單位:秒)。 |
| mcTorqueRgFactor | 1068 | double | R/W | KP、KI 和 KD 會在 mcTorqueReducedGainsDelay 後乘上此倍數。 |
| mcTorqueKIStoppedOnly | 1069 | double | R/W | 在扭矩模式中使用 KI 修正穩態誤差 (steady-state error)。 |
| mcTorqueKDUseSecondEncoder | 1070 | double | R/W | 在扭矩模式中為 KD 使用內部位置編碼器。 |
| mcTorqueMinimumOutput | 1071 | double | R/W | PID 之最小輸出。最小扭矩(單位為百分率%)。 |
| mcTorqueMaximumOutput | 1072 | double | R/W | PID 之最大輸出。最大扭矩(單位為百分率%)。 |
|
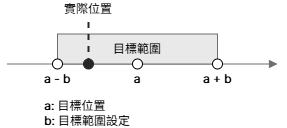
mcMotionStatusFilterDepth |
1083 |
double |
R/W |
設定濾波深度值(以週期數為單位),即實際位置必須持續在目標範圍內達到指定週期數。當插補動作完成且條件達成時,動作指令狀態將被設定為 Done。 圖示範例:
此時的插補動作已完成,且軸的實際位置處於目標範圍內,因此動作狀態濾波器開始計數。當計數達到設定的濾波深度值後,動作指令狀態將被設定為 Done。 |
|
mcFollowActPosDuringPowerOn |
1084 |
double |
R/W |
設定軸在啟動過程中的目標位置是否應跟隨實際位置。 設為 TRUE 以使目標位置於啟動過程中跟隨實際位置;設為 FALSE (預設)以於啟動過程中固定目標位置。 |
原點復歸 (Homing)
| 名稱 | 值 | 資料型別 | R/W | 定義 |
|---|---|---|---|---|
| mcSlaveHomeOffset | 1073 | double | R/W | 原點位置與原點感測器間的偏移量。 |
| mcSlaveHomingMode | 1074 | double | R/W | 選擇一個伺服驅動器所提供的原點復歸模式。 |
| mcSlaveControlLimit | 1075 | double | R/W | 使用從站插補 (modeSlaveInt) 控制模式與 homingSlave 模式時,決定是否使用限制(如軟體和感測器限制)。 |
| mcCancelHome | 1076 | double |
R W |
讀取-回傳 IsHomed 訊號(旗標)。 寫入-TRUE:取消 IsHomed 訊號;FALSE:不執行任何動作。 |
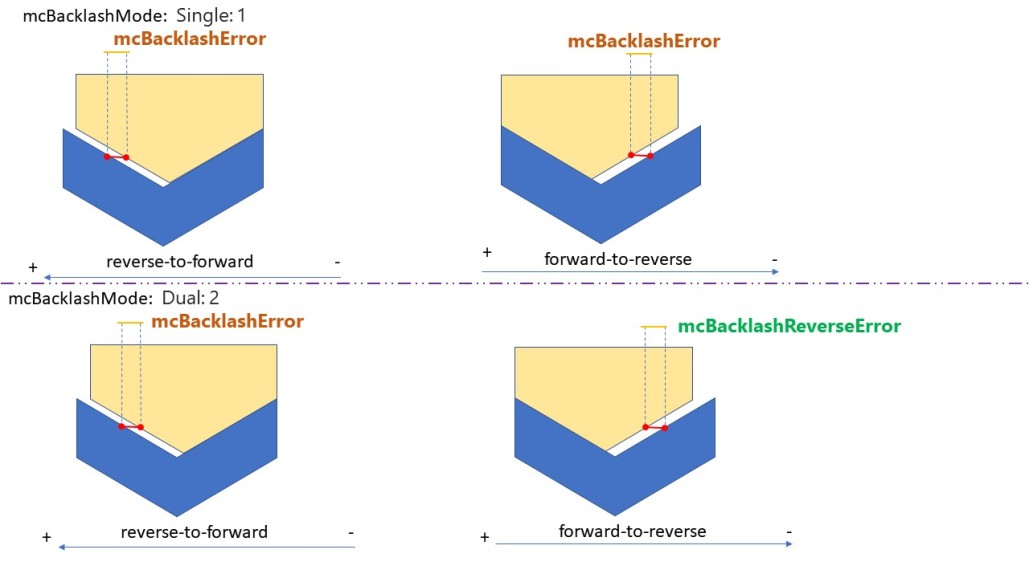
背隙補償
背隙是由齒輪和滾珠螺桿之間的空隙引起的,由於齒輪間具有小間隙導致在切換旋轉方向時造成位置誤差。
| 名稱 | 值 | 資料型別 | R/W | 定義 |
|---|---|---|---|---|
| mcBacklashMode | 1077 | double | R/W |
0:無背隙補償。 1:單一誤差背隙補償:從正向到反向與從反向到正向時的背隙誤差均相同,此誤差是在 2:雙誤差背隙補償:從正向到反向與從反向到正向時的背隙誤差不相同,補償反向到正向的誤差為 |
| mcBacklashError | 1078 | double | R/W |
單位:使用者單位。 模式 1:包含一個補償正向到反向或反向到正向的誤差。 模式 2:包含一個補償反向到正向的誤差。 |
| mcBacklashReverseError | 1079 | double | R/W | 單位:使用者單位。 包含一個補償正向到反向的誤差。 |
圖示
覆蓋因子
| 名稱 | 值 | 資料型別 | R/W | 定義 |
|---|---|---|---|---|
| mcVelocityFactor | 1080 | double | R/W | 速度的新覆蓋因子。 |
| mcAccelerationFactor | 1081 | double | R/W | 加速度或減速度的新覆蓋因子。 |
| mcJerkFactor | 1082 | double | R/W | 加加速度的新覆蓋因子。 |
參見